


REMUS 600 autonomous underwater vehicle (AUV) was designed and developed by Hydroid, a subsidiary of Kongsberg Maritime, in collaboration with the Office of Naval Research to support US Navy missions in both oceanic and shallow waters.
Defence applications of the AUV include organic and expeditionary mine countermeasures, surveillance and reconnaissance, hydrographic survey, and area search. The REMUS 600 is also suitable for marine research and commercial applications.
Recommended White Papers
Recommended Buyers Guides
It is currently operational with the US Naval Undersea Warfare Center located in the state of Rhode Island. The Japanese Ministry of Defense ordered a REMUS 600 AUV for mine countermeasures missions in June 2012.
A REMUS 600 AUV of the US Navy demonstrated its ability to integrate Kraken Robotics-made AquaPix miniature synthetic aperture sonar (SAS) for autonomous mine-hunting operations in January 2018.
REMUS 600 AUV design and operation
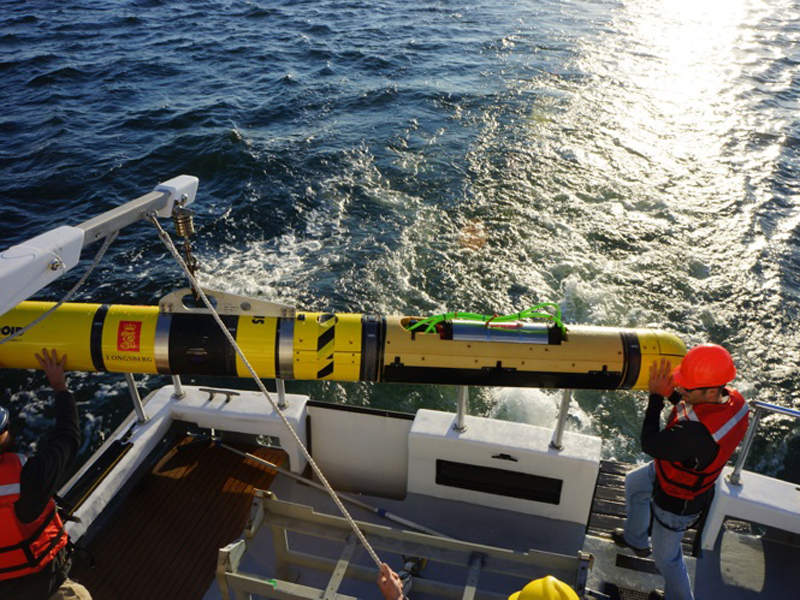
The REMUS 600 AUV has a length of 4.3m and diameter of 0.7m. It weighs 320kg when neutrally buoyant.
The forward section accommodates sonar, auxiliary battery pack and pencil beam, as well as conductivity, temperature and depth (CTD) sensors, while the navigation system is placed next to the auxiliary battery bay.
The motor assembly, main battery unit, and system electronics and communications are installed at the rear.
The tri-fin independent tail control surfaces improve directional stability and control of the vehicle.
The AUV is capable of operating autonomously using pre-loaded mission programming, and the path can be remotely modified by the operator using a rugged laptop computer during missions.
Payloads and sensors
The AUV’s modular design allows for the integration of a range of wet and dry payloads based on customer requirements.
In standard configuration, the vehicle incorporates a compass, obstacle avoidance sonar, pressure depth sensor, acoustic modem, Doppler velocity log and emergency recovery equipment.
The vehicle uses an inertial, long-baseline (LBL) acoustic positioning system to track underwater objects and divers. A satellite-based augmentation system (SBAS) enabled global positioning system (GPS) is installed to provide accurate positioning.
A high-resolution still camera can be fitted to capture images of underwater objects. The AUV also incorporates an ultra-short baseline system and acoustic transponder for underwater acoustic positioning.
Other custom sensor options for the REMUS 600 AUV include a dual-frequency side-scan sonar, dynamically focused side-scan sonar, multi-beam echosounder (MBES), forward-looking sonar, terrain avoidance sonar, photosynthetically active radiation (PAR) sensor and HiSAS 2040 synthetic aperture sonar (SAR).
Launch and recovery
The REMUS 600 can be deployed from the stern or midship of any vessel using a self-contained HYDROID launch and recovery system (LARS), which can operate in sea states up to 5.
Autonomous docking capability for the vehicle is provided by the line capture line recovery (LCLR) module, automated docking station, dynamic docking and automated recovery systems.
REMUS 600 AUV propulsion and performance
The REMUS 600 AUV is powered by a direct-drive DC brushless motor, which drives a pair of 12in carbon fibre propellers. It is also equipped with rechargeable lithium-ion battery packs.
The vehicle can travel to a range between 150km and 200km at 2m/s speed and can operate at a maximum depth of 600m.
The AUV is capable of operating autonomously for up to 24 hours in standard configuration.