


Bluefin-21, a modular autonomous underwater vehicle (AUV) developed by Bluefin Robotics, is designed to operate from a range of ships for conducting defence, commercial and scientific missions worldwide.
The Bluefin-21 AUV is an ideal platform for conducting offshore survey, search and salvage, archaeology and exploration, oceanography, mine countermeasures (MCM) and unexploded ordnance (UXO) removal missions.
Recommended Buyers Guides
Phoenix International, a global AUV service provider, acquired a Bluefin-21 vehicle from Bluefin Robotics in mid-2012. The US Navy deployed Phoenix’s Bluefin-21 AUV in the Southern Indian Ocean in April 2014 to locate the missing Malaysian Airlines Flight 370 – a Boeing 777-200ER aircraft.
Bluefin Robotics and Naval Research Laboratory (NRL) successfully concluded a 100-hour long-endurance unmanned underwater vehicle (UUV) mission from Boston to New York using Reliant heavyweight UUV in October 2013.
Reliant UUV is an advanced variant of the Bluefin-21, which serves as a prototype for knifefish mine countermeasure (MCM) UUV of littoral combat ship (LCS) when fitted with a low frequency broadband (LFBB) sonar payload.
Bluefin-21 AUV design and features
The torpedo-shaped Bluefin-21 design incorporates interchangeable payload sections and battery modules. The components of the AUV can be rapidly accessed for in-field maintenance, allowing for missions in quick succession to speed up functional rate.
The Bluefin-21 has a length of 493cm and diameter of 53cm. The dry weight and buoyancy of the vehicle are 750kg and 7.3kg respectively. The compact dimensions and easy launch and recovery from a simple A-frame or docking head ensure operations from wide variety of ships.
The AUV, batteries and associated equipment can be dissembled and placed in easily transportable sections to deploy the system in time-bound, remote missions.
Bluefin-21 AUV payloads
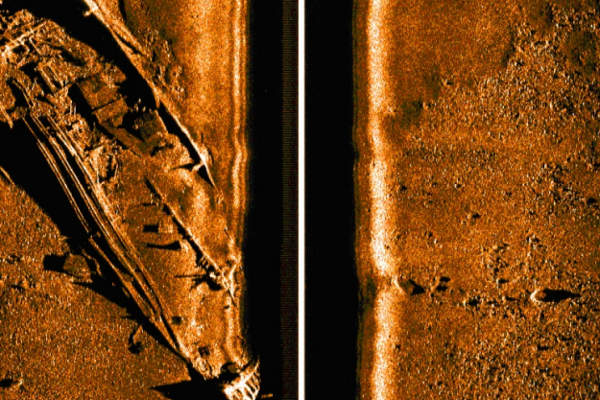
The standard payloads of Bluefin-21 include an EdgeTech 2200-M 120/410kHz side scan sonar / optional EdgeTech 230/850kHz dynamically focused sonar, EdgeTech DW-216 sub-bottom profiler and Reson 7125 400 kHz multi-beam echo-sounder.
The AUV can be equipped with optical payload section integrating Prosilica GE1900 camera system for capturing high-resolution black and white images at up to three frames per second.
The vehicle integrates a four gigabyte flash drive for vehicle data, while additional storage is also available for payload data.
Navigation and communications
The Bluefin-21 employs an inertial navigation system (INS) to deliver accurate navigation. It can be equipped with doppler velocity log (DVL), sound velocity sensor (SVS) and global positioning system (GPS).
The AUV achieves a typical dead reckoning drift rate lower than 0.1% of distance sailed. The ultrashort baseline system (USBL) further ensures accurate navigation and positioning.
The antenna mounted on the vehicle integrates GPS and communication systems. The AUV uses various communication channels including acoustic modem, RF serial link, Iridium satellite modem and Ethernet Direct.
Operation and control
The comprehensive system package of Bluefin-21 includes the vehicle, support instrumentation, spare parts, software, and training. The intuitive operator software tool suite enables interaction between the AUV and operator during all stages of a mission.
The Windows-based tool allows the users to perform mission planning, AUV communications, supervision and implementation of mission, information management, and post-mission analysis. The mission planner graphical tool enables the planning and verification of mission, while dashboard tools allow vehicle tracking, maintenance procedures for subsystems, and mission monitoring. The lantern tool ensures post-mission display and analysis.
The vehicle is also equipped with acoustic tracking transponder, drop-weight, and fault and leak detection system for high-level of safety. It can conduct missions at a maximum depth of 4,500m.
Propulsion and power of Bluefin-21
The Bluefin-21 is propelled by a gimballed, ducted thruster. The power is supplied by nine pressure-tolerant lithium-polymer battery packs, each with a rated power of 1.5kWh. The propulsion system provides a maximum speed of 4.5kt. The underwater vehicle has an endurance of 25 hours at 3kt speed while carrying standard payload.
.gif)