


The DriX unmanned surface vessel (USV), designed and developed by French navigation and positioning solutions provider iXblue, was launched in October 2018.
The USV can be deployed beyond the horizon by amphibious forces to perform a range of maritime operations in both coastal and shallow waters by keeping the crew in safer environments. It can operate independently or as part of a group.
Recommended Buyers Guides
Military applications of the DriX USV include mine warfare, anti-submarine warfare, military bathymetry, rapid environmental assessment and emergency disaster relief. The vessel can also perform bathymetric damage assessment in coastal areas.
DriX USV design and features
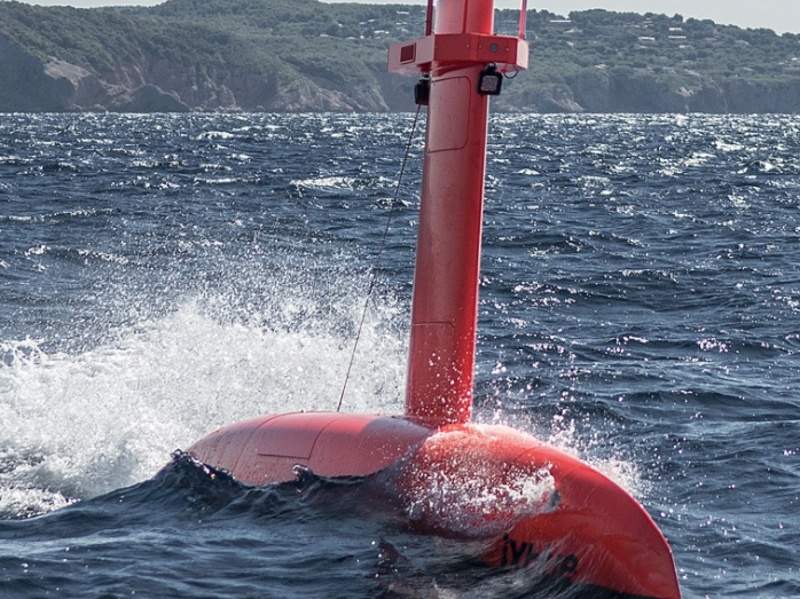
The DriX USV is built with Kevlar-reinforced composite resins using vacuum infusion technique. Built to comply with International Regulations for Preventing Collisions at Sea (COLREGS) rules, the vessel’s hydrodynamic hull with lower radar cross-section and heat signature ensures safe operation at sea in hostile weather conditions.
The vessel has an overall length of 7.7m, beam of 0.7m and displacement of 1.4t. A 250l fuel tank is carried at the stern.
A wide range of payloads for various military operations can be carried due to the open architecture of the DriX USV. Sensors are carried in a gondola that is located 2m below the surface.
DriX unmanned surface vessel launch and operation
The USV can be launched from patrol boats or frigates. Its launch, recovery, refuelling and sensor data collection are performed using a dedicated launch and recovery system (LARS) developed by DriX.
It can operate in fully autonomous, semi-autonomous and direct remote control modes.
In autonomous mode, the on-board autopilot guides the vessel along a predefined path generated by the control and guidance algorithms. The on-board homing device allows the vessel to safely return to its launch position.
The vessel is assisted by the operator in both semi-autonomous and direct remote control modes.
Payloads
The DriX USV is equipped with FLS Series mine obstacle and avoidance sonar to detect, track and classify underwater objects such as unmanned underwater vessels, submarines, torpedoes, patrol boats and mines.
Side-scan sonar is also fitted to search a large area of the seafloor and produce images of objects in shallow waters, while the physical characteristics of the ocean floor are determined using a sub-bottom profiler.
The towed array light sonar on board the vessel can communicate with other submerged autonomous underwater vehicles (AUVs) and submarines.
The AUV features an acoustic Doppler current profiler for the measurement of water current velocities, as well as light detection and ranging (LiDAR) technology to measure ranges. Cameras and optical sensors are also installed to capture pictures.
Other systems installed in the vessel include multi-beam echo sounders and a pre-calibrated global acoustic positioning system comprising ultrashort baseline system.
Data gathered by the sensors can be transmitted to the operators through Wi-Fi within the line-of-sight range. Data can also be retrieved using an on-board retrieval plug.
Propulsion and performance of DriX USV
The DriX USV is powered by a 37.5hp diesel engine coupled to a single propeller through a shaft. It can sail at a speed of approximately 15k and offers an endurance of seven days. It operates at a safe distance from its support vessels.
The vessel’s hull offers greater sea-keeping capability in high seas, while operating independently from the mother ship. Eco drive mode is available to improve fuel economy.