


Bluefin-12 is a medium-class unmanned underwater vehicle (UUV) developed by General Dynamics Mission Systems to provide mission-critical data for defence, industrial and oceanographic research missions.
The autonomous UUV was displayed by General Dynamics Mission Systems at the Defense and Security Equipment International (DSEI) 2019 exhibition, held in London in September 2019.
Recommended White Papers
Recommended Buyers Guides
The UUV can be deployed in tactical missions such as mine countermeasures (MCM), a rapid environmental assessment (REA), search-and-recovery (SAR) and port security.
Its industrial applications include baseline environmental assessment, geophysical survey, water quality measurement, ecosystem assessment and route survey.
Bluefin-12 technical specifications
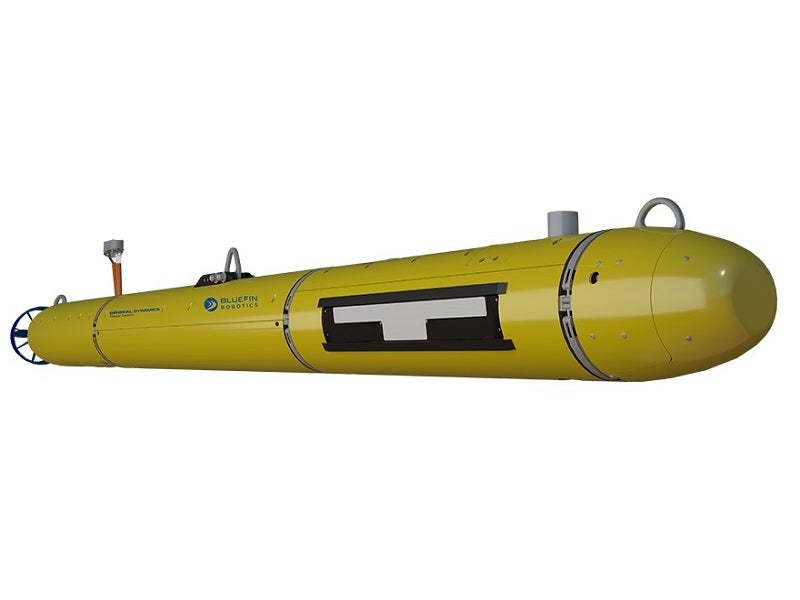
The lightweight UUV is 4.83m-long and has a diameter of 32cm. The depth rating of the vehicle is 200m.
The vehicle weighs 250kg when fitted with an integrated survey package and offers high-buoyancy in fresh and salt waters. It features lift points at the nose, centre and aft sections.
The modular architecture simplifies in-field maintenance and reduces operational down-time. The vehicle can be recovered, reconfigured and redeployed within 30 minutes. It can be launched and recovered from different types of vessels.
Payload
The modular UUV supports the integration of sensors and payloads preferred by the operator. The base vehicle offers a space of more than 4,000cm³ for payloads and Bluefin Robotics standard interfaces for payload addition.
There is also an option to equip the UUV with an integrated survey package, including a Sonardyne Solstice multi-aperture side-scan sonar, forward-looking sonar (FLS), a removable data storage module, high-definition machine-vision camera, camera light, turbidity and fluorometer sensor and Sea-Bird Scientific ECO Puck optical sensor.
The side-scan sonar offers a 200m swath range and an along-track resolution of 0.15°.
The autonomous underwater vehicle can also be installed with an automatic target recognition system.
The onboard survey package transforms the UUV into a state-of-the-art, long-endurance, reliable sonar survey vehicle that can significantly extend operations.
Bluefin-12 UUV navigation and communications
The Bluefin-12 is equipped with a dedicated inertial navigation system, Doppler velocity log, Wi-Fi, iridium and acoustic communications, as well as an integrated environmental sensor suite.
The UUV delivers accurate navigation and geo-referenced data. The FLS on the vehicle provides independent terrain-following and collision-avoidance capabilities.
The underwater vehicle is also equipped with safety systems such as ground fault detection, leak detection and independently powered emergency operations system.
Command and control
The removable data storage module aboard the UUV produces and stores post-processed data with an easy interface to the mission controller’s workstation.
Its monochrome camera captures images and video that are geotagged for easy evaluation during post-mission analysis.
The Bluefin-12 is delivered together with an operator tool suite, offering a simple interface between the UUV and the operator during all mission phases. The software package increases the operator’s effectiveness in missions.
The Windows-based tool suite enables UUV check-out and testing, mission planning and verification, communications, mission observation and execution, data management, as well as post-mission analysis.
It allows the operator to send mission-specific commands through the standard payload interface.
Bluefin-12 propulsion
The Bluefin-12 UUV is propelled by a gimbaled, ducted thruster, installed at the rear section. The thruster is powered by four 1.9kW/h rechargeable lithium-ion batteries.
The propulsion system provides an optimal sustained transit speed of 6k and a survey speed of 5k.
The vehicle offers an optimal endurance of 36h at 2k speed.
The swappable and rechargeable batteries can be rapidly removed for charging. Each dismounted battery can be recharged in six hours.