


Tethys is a new class of long-range autonomous underwater vehicles (LRAUV) manufactured by Monterey Bay Aquarium Research Institute (MBARI), an oceanographic institute based in the US.
It is a high-performance torpedo-shaped system, which can be optimised for a wide range of applications including defence operations, such as intelligence, surveillance, and reconnaissance (ISR) and anti-submarine warfare (ASW). In addition, it can be used for scientific applications such as oceanographic research, seafloor mapping, and environmental monitoring.
Recommended White Papers
Recommended Buyers Guides
The vessel offers a solution to fulfil the operational requirements of higher speeds, larger payload size, and low power consumption.
The development of the vehicle was funded by the David and Lucile Packard Foundation, while that of its docking station was funded by the US Defense Advanced Research Projects Agency (DARPA).
MBARI collaborated with Saab, a defence company based in Sweden, under a commercial licencing agreement to introduce the LRAUV to the oceanographic research, commercial, and military markets in the US as Saab Tethys in September 2023. They jointly exhibited the Tethys LRAUV at the OCEANS 2023 Gulf Coast Conference in Biloxi, Mississippi, in the same month.
Tethys-class LRAUV development
The development of the LRAUV began in 2007 to build a new class of highly energy-efficient, propeller-driven autonomous underwater vehicles (AUVs) that can support diverse chemical and biological sensing operations from a range of 1,000km or more.
Tethys performed the first short autonomous mission, off the coast of Moss Landing, in December 2009. A fleet of ten Tethys-class LRAUVs was operated for more than 17,000 hours offshore, utilising a web-based interface from different locations across the globe for missions continuing for 24 hours to more than three weeks. The vehicle achieved a range of 1,800km at 1m/s speed for a three-week duration using a primary battery.
Tethys-class LRAUV design and features
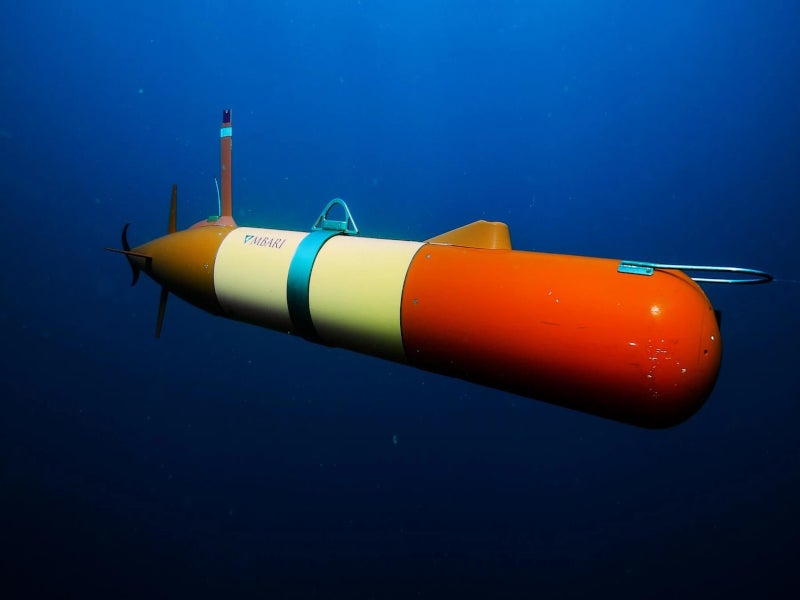
Tethys is a 2.3m (7.5ft) long, 0.31m (1ft) wide and 0.31m (1ft) high torpedo-shaped AUV with a hemispherical nose, parallel middle section, and a convex-conical tail made of aluminium. Weighing 110kg, the AUV is 12in (30cm) in diameter and can dive up to 1,500m below the surface.
The vehicle can be launched from either a ship or from shore. It can travel for 1,000km at 0.75m/s for weeks at a time, which can be extended to a range of more than 2,000km at 1m/s with primary batteries.
The LRAUV has an endurance of 740 hours with a nominal load. The extended endurance allows the vehicle to operate in remote locations such as under the ice and in compact areas.
The range and endurance of the LRAUV increase the diversity of observations and experiments, which can be carried out by the platform. Operators from shore can intervene in the operations of the vehicle through satellite link communication.
The vehicle’s capability to operate in a low-power transit mode and its ability to be remotely controlled via the internet enables operators to initiate vehicle launches from the shoreline and execute complex missions in distant areas without the need for a support ship.
Tethys can be transported by helicopters, enabling quick deployment to respond to incidents and offer situational awareness support for first responders.
Sensors details
Tethys can accommodate a range of smaller high-power sensors, which can sense ten times farther, improving the reach of the LRAUV into the California Current system, a surface oceanic current in the Pacific Ocean.
Its suite of science sensors in the nose section includes SBE GPCTD temperature, conductivity, and depth sensors, a WET Labs BB2FL fluorescence/backscatter sensor, an Aanderaa 4831F dissolved oxygen sensor, and a LI-COR LI-192SA photosynthetically active radiation sensor.
The vehicle features improved power management capability, allowing intermittent usage or complete stoppage of sensors for reducing power consumption to attain long ranges and endurances.
Propulsion
The Tethys LRAUV combines the mobility and speed of propeller-driven vehicles and the energy savings of buoyancy-driven vehicles.
It features a high-efficiency propulsion system including a custom propeller and a gearless 16-pole direct-drive brushless DC propulsion motor optimised for efficient operation at low speed.
Additionally, Tethys’ oil-filled buoyancy engine is capable of ballasting to neutral buoyancy and drifting in a lower power mode at a controlled depth. The vehicle features a 1l variable ballast system (VBS) and a movable 30kg battery pack to manage its buoyancy.
The combination of the propeller drive and VBS allows the vehicle to come to a halt and execute a low-power hovering manoeuvre.
Performance
Tethys can operate efficiently in three distinct speed ranges. It can maintain a consistent depth and remain stationary. It can function within a range between 0.5m/s and 0.7m/s for extended durations to optimise its operational range. In addition, it can reach a speed of 1m/s, ideal for various scientific applications such as data collection and rapid response to events.
It utilises various types of actuators to accommodate different operational modes, including conventional elevators for high-speed movement, a movable internal mass akin to a glider for low-speed motion, and variable buoyancy for drifting.
Its core electronics have been tailored for minimising power consumption. Furthermore, the vehicle’s microprocessors can be reduced to lower clock speeds whenever possible, such as during drifting.
Additional measures, such as reducing drag with a low drag afterbody, minimum appendages and controlling the induced drag, further reduce the propulsion power of the vehicle.
Payload details
Tethys can be equipped with a variety of powerful payloads compared to oceanographic gliders, based on the requirement, and is thus optimised suitably for payload power consumption of about 8W.
It can be outfitted with different equipment and payloads to meet specific needs, such as the third-generation environmental sampling processor (3G-ESP), which can independently filter a water sample. The sample can be subsequently preserved either for analysis later in a laboratory or can be immediately processed for additional molecular analytical examinations downstream.