
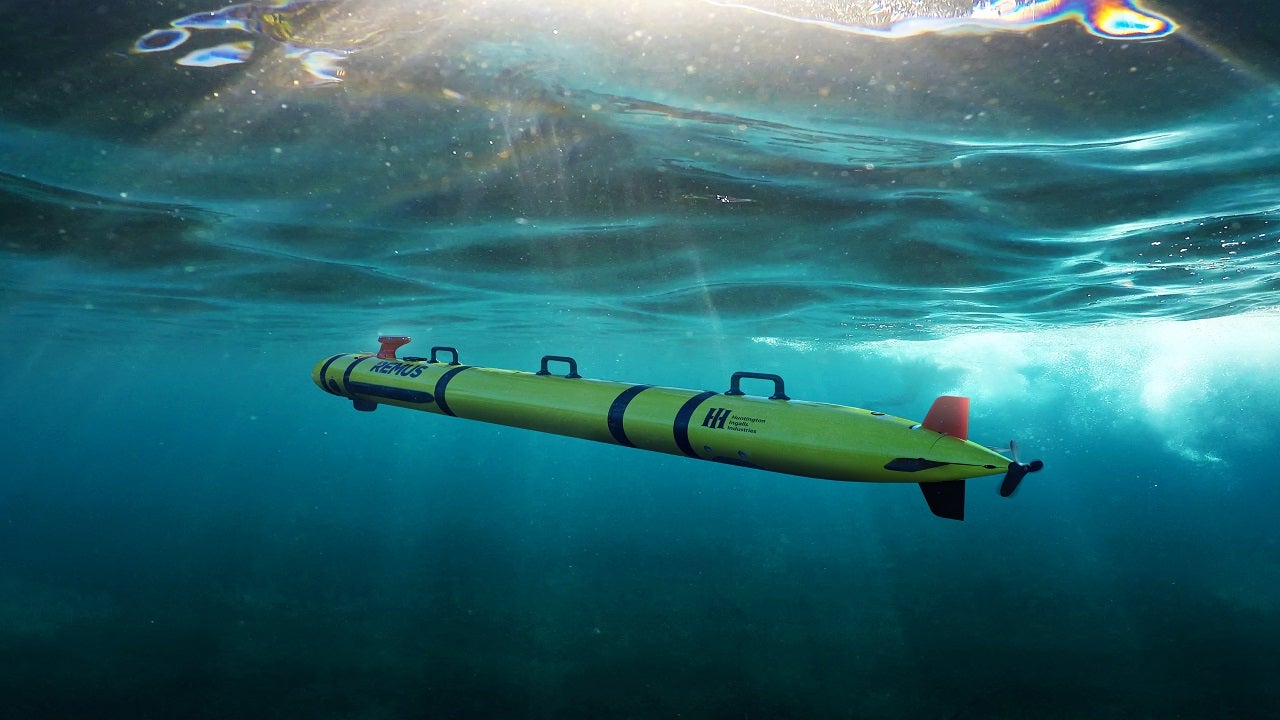

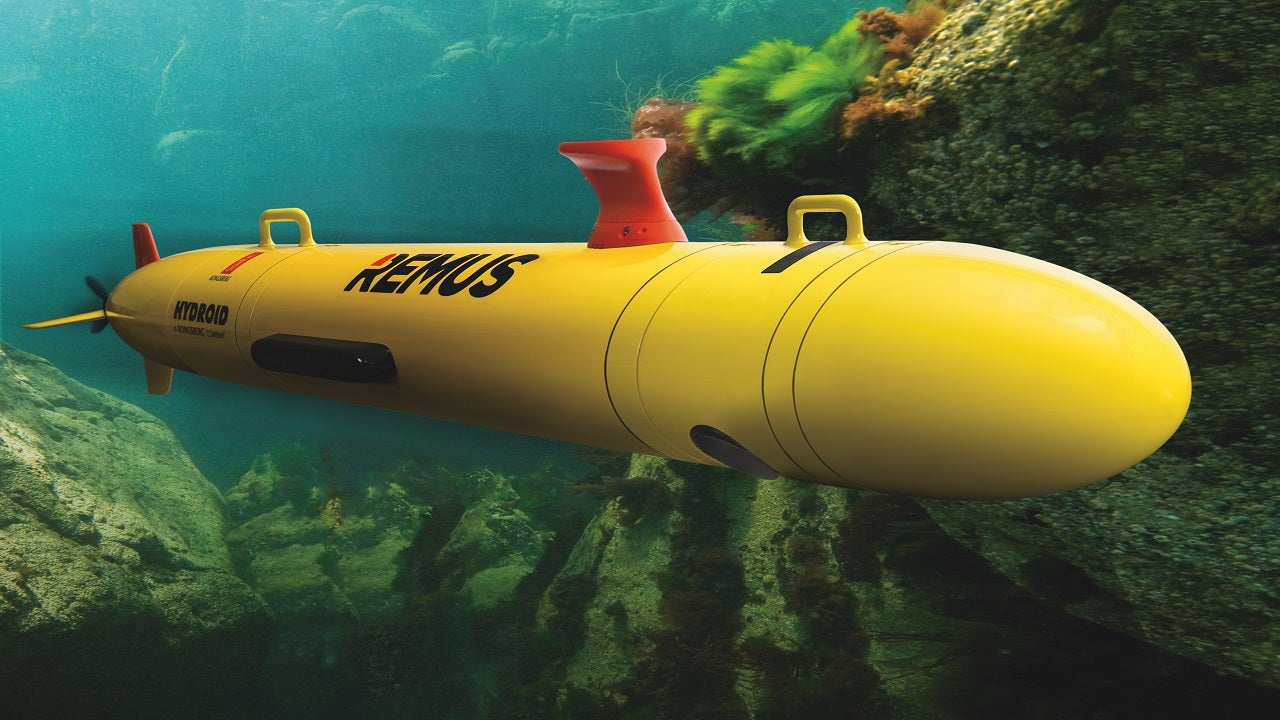
The REMUS 300 is a small-class unmanned underwater vehicle (UUV) built for military and commercial applications. With improved modularity and maximum payload flexibility, the vehicle is among the most advanced UUVs on the market.
The two-man portable vehicle is manufactured by US-based underwater technology company Hydroid, a subsidiary of shipbuilding company Huntington Ingalls Industries (HII). HII acquired Hydroid from Norwegian aerospace and defence company Kongsberg for $350m in March 2020.
Recommended Buyers Guides
Part of the REMUS family of autonomous vehicles, the REMUS 300 vehicle was designed and developed as a commercial product.
The primary applications of the REMUS 300 UUV are mine countermeasures, search and recovery, rapid environmental assessment, hydrographic survey, renewables, marine archaeology, offshore oil and gas, anti-submarine warfare and intelligence, surveillance and reconnaissance.
The commercial availability of the standard REMUS 300 model was announced in April 2021. Hydroid sold more than 500 REMUS UUVs to 25 countries.
In July 2025, HII received an order from Hitachi for more than a dozen REMUS 300 vehicles to be supplied under a multi‑year delivery programme.
REMUS 300 UUV design and features
The REMUS 300 was designed in compliance with the US Navy’s Modular Open Systems Architecture and Unmanned Maritime Autonomy Architecture specifications. It incorporates design improvements from the REMUS 100 autonomous underwater vehicle.
The standard REMUS 300 weighs 56kg and its length and diameter are 2.3m and 19cm respectively. The vehicle’s modularity allows it to be reconfigured for missions ranging from a 45.35kg expeditionary configuration to a 67.58kg long-endurance configuration.
The REMUS 300 retains the already trusted REMUS 100’s hull design with improvements which will enable the vehicle to dive to a maximum depth of 305m (1,000ft).
The UUV has advanced features such as a more robust structure and sensors, a data distribution system, open architecture, flexible energy options, a new HyFleet graphic user interface with a simulator, and a removable 1TB solid-state hard drive.
The improved design allows for increased capabilities and interoperability, in addition to a range of applications at a reduced cost. The open architecture is designed to enable rapid integration of the latest modules and software, as well as allow for future upgrades based on mission requirements.
HyFleet provides automatic mission validation and drag-and-drop functionality to facilitate quick mission planning while also enabling simultaneous monitoring of multiple vehicles.
The next-generation REMUS 300 is incorporated with the REMUS technology platform, which features efficient core electronics and is scaleable across all vehicle classes. It has advanced autonomy and a shared operating system that enables interoperability with the entire REMUS family of systems.
Payloads and sensors of the REMUS 300
The REMUS 300 is available in small and large payload configurations to meet customer requirements. It also allows the addition of a payload to collect additional information.
The UUV can be equipped with a suite of sensors and payloads to support a range of mission requirements. The improved design supports the integration of new payloads, sensors, and algorithms.
The underwater vehicle can be equipped with a vehicle interface programme to provide mission programming and post-mission analysis capabilities.
Sensors aboard the vehicle include a Marine Sonics MK II Arc Scout 900Hz/1,800kHz dual-frequency side-scan sonar with a resolution of up to 5cm and a swath width of up to 160m, an NBOSI conductivity and temperature sensor, and a TE Connectivity depth sensor.
A software development kit and a hardware development kit enable the integration of third-party payloads and autonomy.
Optional payloads and sensors include a 2G Robotics 4K HD stills camera module with a high-intensity LED lightbar, Seabird Scientific Eco Puck Triplet environmental sensor, and Klein MA-X gap-filling sonar.
Navigation and communication on the REMUS 300 UUV
The navigation equipment installed aboard the REMUS 300 includes an iXblue Phins C3 inertial navigation system, a long baseline, a Garmin commercial or optional GB-Gram military global positioning system (GPS), and Doppler-assisted dead reckoning.
The UUV uses Woods Hole Oceanographic Institution micro-modem 2.0 acoustic communications for underwater communication. Other communication systems include Wi-Fi and an optional iridium system for communication through satellite.
Propulsion and performance of the REMUS 300
The unmanned vehicle is powered by a direct-drive DC brushless motor coupled to an open three-blade propeller. The control system includes a cruciform fin for yaw and pitch control.
The REMUS 300 can be configured with 1.5kWh, 3kWh or 4.5kWh lithium-ion batteries with an endurance of up to ten, 20 or 30 hours, and a recharge time of six, 12 or 18 hours respectively. The blind-mated end caps fulfil the requirements of IP-X4 standards, allowing for rapid battery exchanges on the field during missions.
The vehicle is capable of achieving speeds up to 5kt. The standard variant has a maximum range of 110km, while the long-endurance version has a maximum range of 165km.
REMUS 300 UUV orders and deliveries
Hydroid delivered the first REMUS 300 UUV prototype to the US Navy in February 2020, as part of a prototype project agreement with the US Department of Defense’s Defense Innovation Unit.
The REMUS 300 prototype was assessed by the Naval Information Warfare Center to study its potential as a solution for the US Navy’s next-generation small-class UUV (SUUV) programme, also known as Lionfish. The study involved multiple user evaluations and spiral developments to improve the UUV’s design for increased military capabilities.
HII received an order from the US Navy to supply two REMUS 300 UUVs in May 2021.
The US Navy selected the UUV as its next-generation SUUV programme of record in March 2022. The programme includes the production and testing of the UUVs in 2023, and the selection came after the completion of the two-year rapid prototyping effort.
The company received the first international order for the REMUS 300 UUVs in June 2021, with the Royal New Zealand Navy placing an order for four UUVs.
The four REMUS 300 UUVs were delivered in August 2022 for deployment in mine countermeasure and survey operations.
HII announced the sale of three REMUS 100s and five REMUS 300s to the UK Royal Navy in May 2024.