

Bluefin-9 autonomous underwater vehicle (AUV) was developed by General Dynamics Mission Systems to deliver detailed subsurface data for defence, commercial and academic applications.
It is a two-man portable vehicle, which can be deployed and recovered from a variety of platforms, such as piers, rigid-hulled inflatable boats (RHIBs) and other vehicles.
Recommended White Papers
Recommended Buyers Guides
The vehicle was unveiled at the Oceans 2018 conference held in Charleston, South Carolina, US, in October 2018.
The Bluefin-9 is suitable for a range of missions, such as inshore surveys, hydrographic mapping, rapid environmental assessments and mine countermeasures. It is also used for port and harbour security, search and recovery, environmental protection and monitoring, and intelligence, surveillance and reconnaissance (ISR).
General Dynamics offers the Bluefin-9 with a warranty of 18 months and its world-class operational training.
Bluefin-9 autonomous underwater vehicle design and features
The Bluefin-9 is torpedo-shaped and incorporates a fully composite fibre body. It is buoyant in fresh and salt water and is equipped with nose and aft mounted carrying handles. It is 241.8cm long, with a diameter of 23.8cm and dry weight of 70kg.
Back-up systems are provided for the vehicle’s core functions to respond to internal emergencies in the event of a failure. A low-power microcontroller on board the vehicle ensures the transfer of location data between the key communication systems and the operator to safely recover the vehicle.
Advanced data processing capabilities of the vehicle enable the delivery of processed camera and sonar data for analysis after the mission.
Bluefin-9 AUV payloads
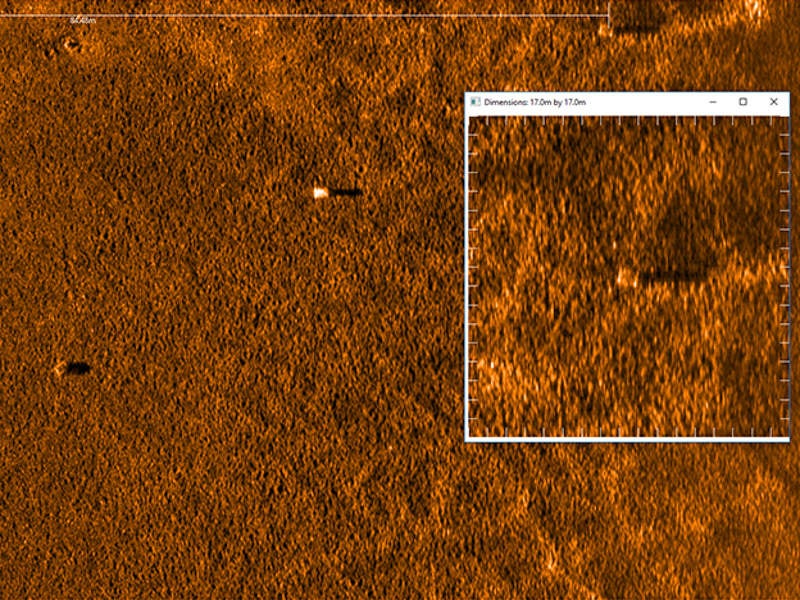
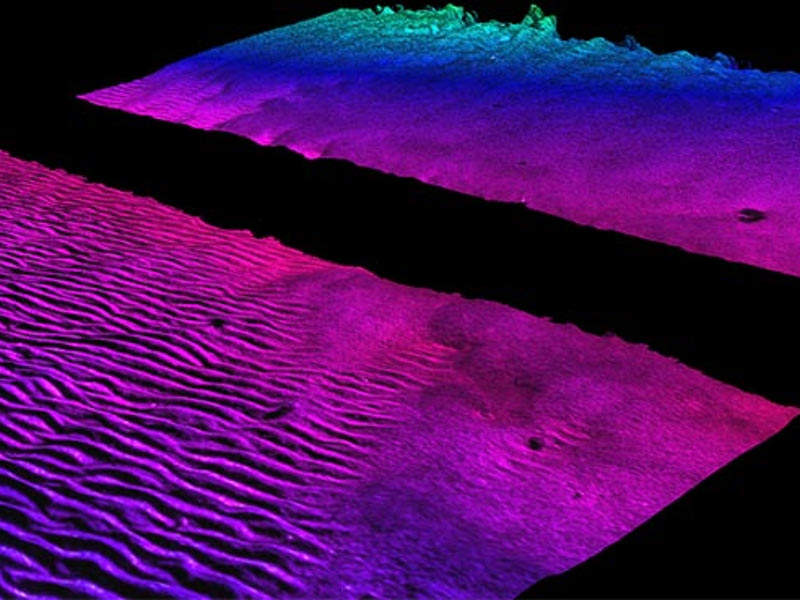
Bluefin-9 carries a variety of payloads, including Sonardyne Solstice 3000 multi-aperture sonar, removable data storage module (RDSM) with camera and a range of sensors, such as turbidity and fluorometer sensor, sound velocity sensor, and temperature and pressure sensors.
The sonar device provides high-resolution imagery for hydrographic and bathymetric mapping. The multi-aperture sonar can sweep a 200m range and offers an ultra-high along-track resolution of 0.15°.
High-resolution data minimises false positives and improve operational efficiencies. The AUV is equipped with Nortek doppler velocity logs (DVL), which gather data on water currents up to 30m.
The RDSM contains a high-definition, machine vision-grade monochrome camera, which captures images and videos.
The AUV allows for quick maintenance and easy exchange of the battery and RDSM, which can be replaced within 30 minutes.
Navigation and communications
The Bluefin-9 autonomous underwater vehicle has a dedicated internal navigation system, which provides real-time navigation accuracy up to 0.3% D.T. CEP 50. The vehicle offers geo-referenced data by using high-quality DVL. It also has an antenna integrated with a global positioning system (GPS), Wi-Fi and external iridium communication systems.
It comes with a Windows-based operator tool suite, a system that provides an interface between the vehicle and its operator. The tool provides all necessary options, such as vehicle testing, mission planning, communication, data management and post-mission analysis.
The suite has a mission planner and dashboard tool. The mission planner allows the operator to formulate plans and specify safety settings, recovery points and return plans. It also enables the operator to command using a standard payload interface.
The dashboard tool helps the operator to track the position of the ship with respect to the vehicle, its behaviour and status. It can automatically tune to the highest bandwidth channel available in order to maintain uninterrupted communication with the vehicle.
Propulsion
The Bluefin-9 autonomous underwater vehicle is equipped with a ducted gimbaled thruster for propulsion and control. Powered by a 1.9kWh rechargeable Li-Ion battery, the vehicle can reach a maximum transit speed of 6k (11.1km/h).
It can conduct surveys at speeds of up to 5k (9.2km/h) and can remain in the water for eight hours at a speed of 3k (5.5km/h).