
A9-M Autonomous Underwater Vehicle
A-9M is an autonomous underwater vehicle (AUV) designed and manufactured by ECA Group.
Graal Tech is a research and consultancy SME working in the fields of automation, underwater robotics, control system design, instrumentation and electromechanical engineering.
You have successfully submitted your enquiry. Someone from our company will respond ASAP
Graal Tech is a research and consultancy SME working in the fields of automation, underwater robotics, control system design, instrumentation and electromechanical engineering. The firm was established in 1998 as a spin-off company from DIST (Department of Communication, Computer and Systems Sciences, University of Genova).
The company mission is providing innovative electromechanical devices, responding to any customer demand. Two fundamental factors enable Graal Tech to pursue its objective: the presence of a team of diversified senior engineers (mechanical, electronic, software and control) encompassing all the competencies required for conceiving, designing and realising any intelligent mechatronic system; and expertise in adopting a multi-disciplinary approach to problems, fusing the skills of our team in a goal-oriented project plan to meet all the application specifications.
The Folaga autonomous underwater vehicle (AUV) is a low-cost platform with surface navigation capability:
Originally designed for applications related to environmental monitoring, the current version, with its renewed design, also allows missions concerning inspection and security activities, thanks to its greater maneuverability, empowered operative autonomy, and ease of integration with different kinds of payload modules.


Folaga’s high maneuverability makes it a hybrid vehicle, characterised by actuation mechanisms similar to those of oceanographic gliders and of self-propelled AUVs, together with the hovering capability typical of ROVs.
The motion in the surge direction is obtained through propulsion jet-pumps at the vehicle stern, while steering in the surge – sway plane is obtained through two power jet-pumps at the vehicle bow, transversal to the surge direction. Vehicle diving is obtained by a combination of buoyancy and attitude change.
Buoyancy is controlled through a ballast chamber, while attitude is controlled through the internal displacement of the battery pack.
The combined use of buoyancy and attitude change allows the vehicles to dive in several different ways: from vertical dive with 0° pitch (preferred diving mode for oceanographic data profiling), to combined attitude change and surge propulsion (keeping the vehicle neutrally buoyant), to combined attitude and buoyancy change (with or without propulsion).
Folaga can host different kinds of sensors and the integration of a mission payload is very simple and effective thanks to the vehicle’s modular design. The hull is constituted by two independent modules, each one neutrally buoyant and balanced, which can be opened for hosting any custom or COTS device.
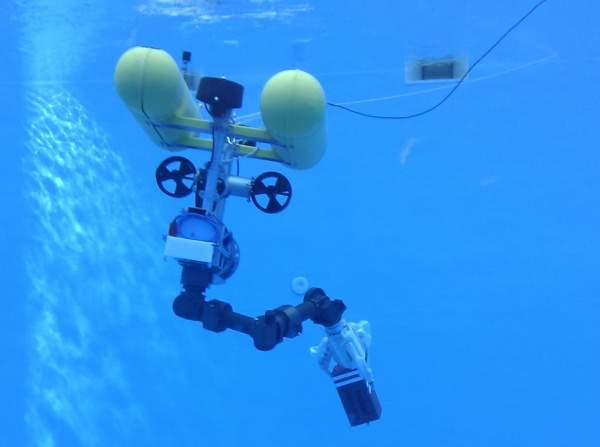
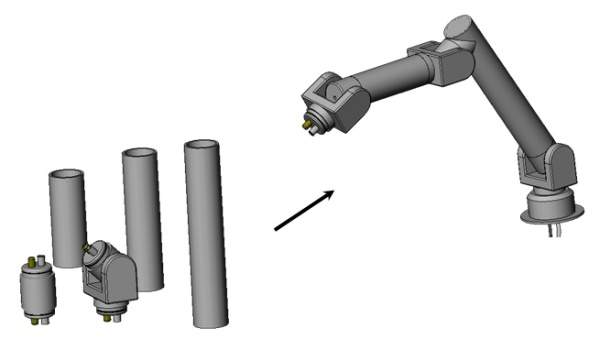
Graal Tech’s UMA (underwater modular arm) has been conceived within the EU-funded TRIDENT project. As the name suggests, it is an underwater manipulator, designed by adopting a modular approach. Two kinds of electrically-driven joints are available (respectively with one and two motion axis) together with a set of links for connecting the joints.
By varying the number of basic modules (joints and links) or the way they are interconnected, several different kinematic configurations can be obtained. The resulting benefit is a high level of re-configurability.
Every motion axis is actuated by a brushless DC motor. The adoption of an electric-based actuation system highly simplifies the control of the robot and, at the same time, provides a better maneuverability and a higher precision than those achievable with conventional hydraulic manipulators.
The low-level position and speed control of every motor is provided by a dedicated motion controller board embedded inside the joint. Every board can receive motion commands through a CAN-bus interface at a rate of up to 200Hz.
The position feedback of any motion axis is provided by the embedded motion controller board with a rate of up to 200Hz and with a resolution between 10-3 and 10-4 degrees (depending on the gear ratio between the motor and the motion axis).
Technical specifications of the seven function arm:

A-9M is an autonomous underwater vehicle (AUV) designed and manufactured by ECA Group.