
Scanmatic develop, produce and deliver industrial systems and products within the areas of data acquisition, remote control and surveillance, industrial data communication, SCADA systems and hydro acoustics.
Scanmatic channel a unique knowledge of hydro acoustics into meeting the requirements of various industries, and establishments such as NATO, whilst offering training of personnel, consulting and development of sonar technology and wireless sub-sea communication.
SOUND REGISTRATION AND ANALYZER SYSTEM (SONRAS)
The Sonar Registration and Analyzing System (SONRAS™) is a complete system for receiving, storing and analyzing underwater sound.
The buoy records sound from the sea, and analyses and transfers the result to the SCS. Raw data and processed data are stored on CompactFlash in the buoy for later analysis. A complete plot of GPS positions is also stored in the buoy, so that relative distance can be computed in the SCS for normalizing the noise data. In operation the SONRAS buoy reads and reports the GPS positions.

SONAR CALIBRATION AND TRAINING SYSTEM (SONCAT)
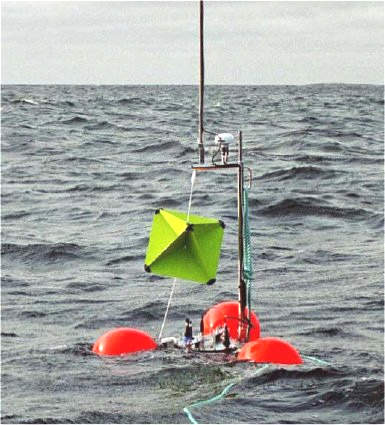
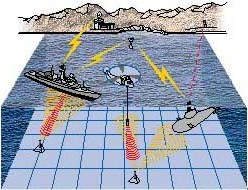
The SONCAT test system is a simulated target system for testing sonars at sea. Sonars can be active, passive mode of active sonars and sonar intercept. The system consists of two main parts:
- A GPS positioned, battery operated buoy, containing all necessary electronics for amplifying signals from the hydrophone, and transmitting data to the SONRAS Control System (SCS).
- A PC based SCS on board the ship or offshore installation for the control of buoys and settings, and presentation of received data.
Applications of the SONCAT include,
- Sonar performance tests (transmitter level and frequency, receiver sensitivity, target classification and torpedo noise detection)
- Sonar operator training
- Sonar intercept test
- Radar bearing and range
The two units communicate using a radio link. The range and bearing of the ship radar can also be checked combining the radar reflector echo with the GPS position of the buoy.
THE SONCAT CONTROL STATION (SCS)
The SCS is the main interface from the ship to the sonar test buoy. All parameters in the Active Sonar Processor (ASP) are controlled from a Windows®-based application program Sonarpos. The system consists of two main parts:
- A GPS positioned, battery operated buoy, containing all necessary electronics for amplifying signals from the hydrophone, and transmitting data to the SONRAS Control System (SCS).
- A PC based SCS on board the ship or offshore installation for the control of buoys and settings, and presentation of received data.
Time and position when receiving a sonar pulse, calculated distance and bearing to the buoy, received and transmitted source level at the buoy, all parameter settings of the buoy when processing the sonar pulse, battery capacity and some other conditions are displayed on the operator screen at the SCS.
SONAR TRAINING TARGETS
The use of real targets in operational sonar testing is costly, creating a need for artificial alternatives. The Royal Danish Navy has for some time used the Sonar Calibration and Training (SONCAT) system from Scanmatic as a target simulator for their sonar sensors.
This system consists of a floating buoy communicating over radio with a ship borne control station. Although the SONCAT system has proved its functionality as an artificial target, it is not self-propellant and therefore lacks the possibility of giving correlation between Doppler (speed), distance and bearing to the target.
GAVIA PORTABLE AUV SYSTEM
Scanmatic utilise the Gavia AUV system. Gavia is a highly versatile multipurpose, portable AUV that has a modular construction that allows for user changeable modules. The Gavia can carry cameras, side scan sonar, IHO precision bathymetric sonar, various environmental sensors, and payload modules that can be fitted with custom instrumentation.
The setup of the sailing mission for the AUV and the corresponding setting and activation of the functionality in the mounted payload module are all done in a graphical user interface on the Gavia control PC, as are read-back of results and data from the mission.